
本研究所は、八木・宇田アンテナやマグネトロンなど、1930年前後の本学工学部電気工学科における電気通信の先駆的研究の高まりを背景に、1935年、附属電気通信研究所として設置されました。迅速なシステム実現・社会実装に向けた研究体制の強化とコミュニケーションの未来を見据えた改組を2023 年4月に実施し、20余の研究分野から構成され20年のホライズンの研究を行う3研究部門、10年のホライズンで活動する 2研究施設、5年のホライズンを特化して行う研究開発センターの3体制を整えております。2024年度には学際融合研究を実施する研究センターが新たに活動を開始しました。90周年を迎える2025年度には、レンタルラボを備えた新研究棟を竣工予定で、これをオープンイノベーションの拠点として新たに活用を始める予定です。そして、情報通信分野唯一の共同利用・共同研究拠点として研究者コミュニティに開かれた共同研究を推進し、国内外の研究者と連携して「人間性豊かなコミュニケーションを実現する総合的科学技術」の研究を行い、先導的役割を果してまいります。
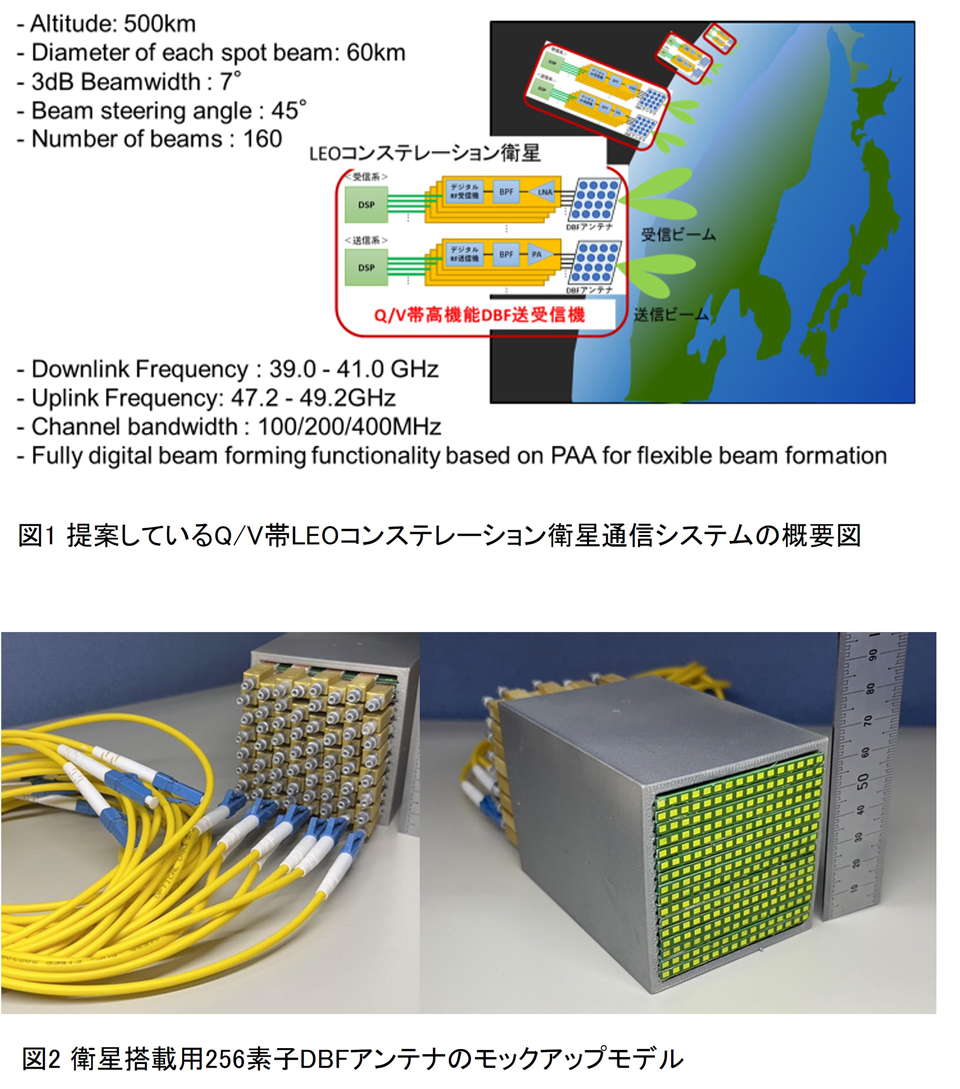
産学連携体制で、新しいミリ波の周波数帯であるQ/V帯を用いた低軌道(LEO)コンステレーション衛星通信システムの研究開発に、取り組んでいます。令和6年度は、新たに国際電気通信連合無線通信部門(ITU-R)にアカデミア会員としての加入を果たし、国際的なQ/V帯の周波数権益の確保を目指した活動を開始しています。
B5G/6Gにおいては、陸海空を網羅し、地上系と階層的な構造を構築できるNon-Terrestrial Network (NTN) が注目されています。なかでも、スターリンクに代表されるLEOコンステレーションは、衛星系にあって大容量・低遅延特性が得やすくなっていますが、既にグローバルサービスがKu帯、Ka帯の周波数帯で開始されているため、ミリ波のQ/V帯(40/50GHz帯)の開拓が急務となっています。本研究では、産学連携体制で、Q/V帯LEOコンステレーション衛星通信システム(図1)の検討、提案を行っています。また、災害時やイベンドなどの大きな通信トラフィックの変動にも対応可能とするため、よりフレキシブルなビーム形成が可能なフルディジタルDBFアンテナ(図2)を提案し、欧州宇宙機関(ESA)から宇宙通信関係国際学会の講演資料を引用されるなど国際的にも注目されています。令和6年度から国際電気通信連合無線通信部門(ITU-R)にアカデミア会員として加入し、国際的なQ/V帯の周波数権益の確保を目指した活動を行っております。
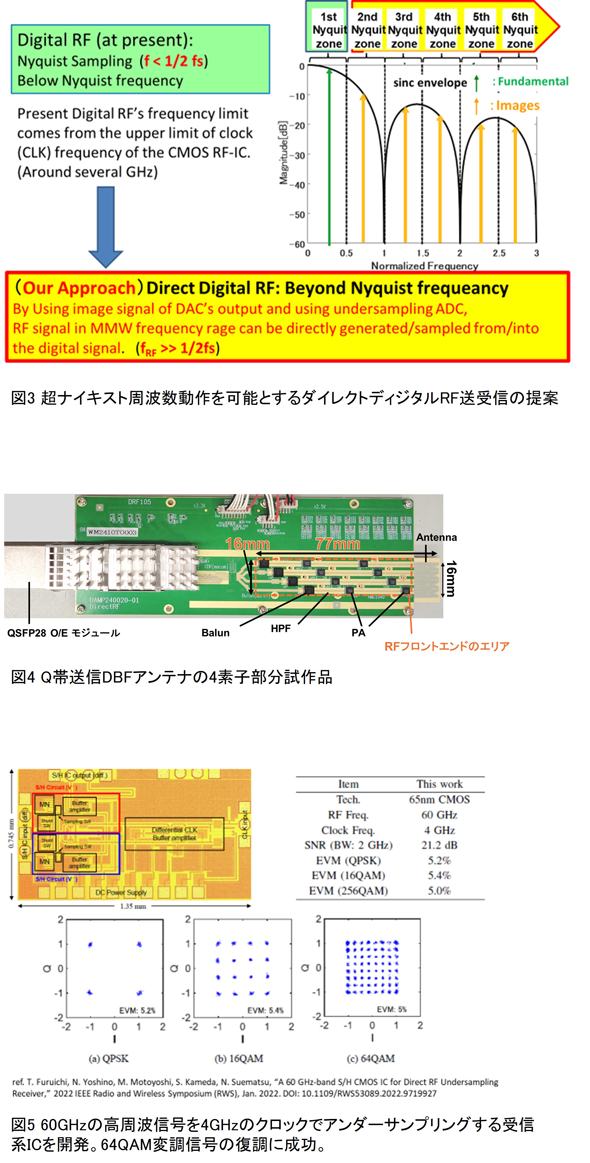
フルディジタルDBFアンテナでは、アンテナ素子毎に独立した送受信機が必要となります。また、Q/V帯アンテナ素子間隔は4mm弱であり、送受信機の小型化が必須となっています。本研究では、送信系においては、ディジタル-アナログ変換器(DAC)の出力信号に含まれる高次イメージ成分を強調する手法(図3)を考案し、ナイキスト周波数を超えるミリ波帯の高周波信号をディジタル信号から直接生成することに成功しました。さらに、Q帯DBFアンテナの部分試作品の動作検証にも成功しています(図4)。受信系においても、V帯の高周波信号を、直接、高次アンダーサンプリングすることができるICの試作に成功しました(図5)。
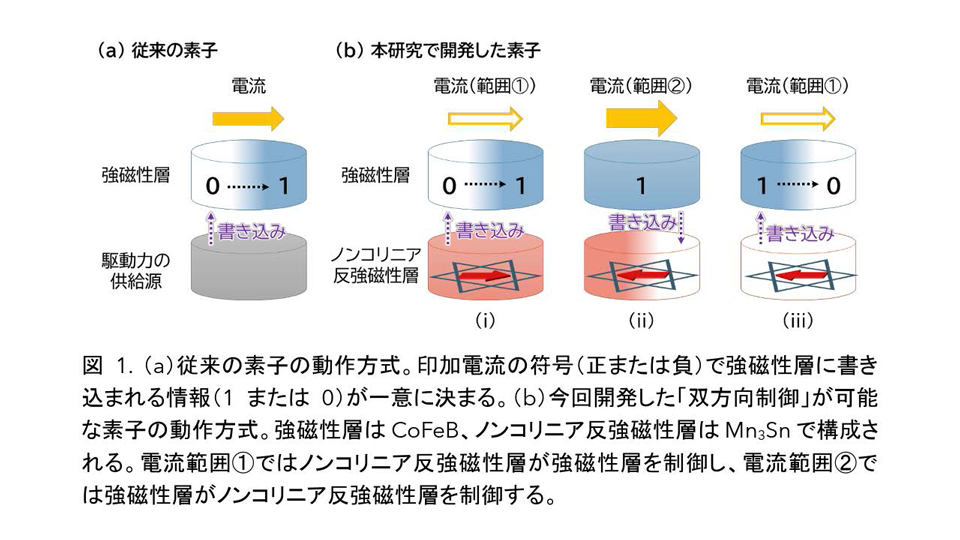
AI技術の普及に伴い、AI計算に適したハードウェアの重要性が高まっていますが、本研究では、ノンコリニア反強磁性体と強磁性体の積層構造での双方向制御を実現し、記憶と演算の機能を併せ持つスピン素子の原理実証に成功しました(図1)。
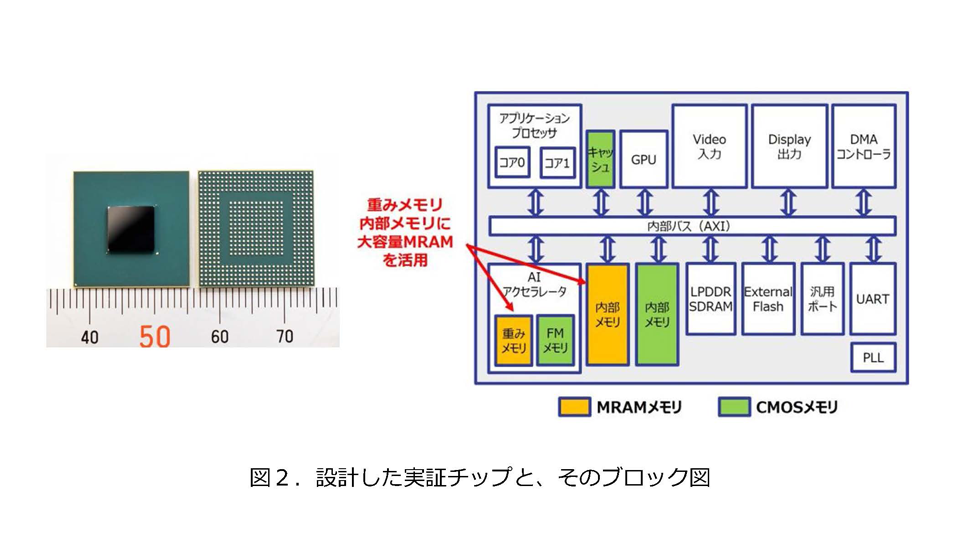
大容量MRAMを搭載したエッジ領域向け「CMOS/スピントロニクス融合AI半導体」により従来比10倍以上の電力効率と10分の1以下の起動時間が得られることを実証し(図2)、CEATEC AWARDネクストジェネレーション部門賞を受賞しました。これは、車載やサーベイランス(監視)システム等の高性能化に貢献する成果となります。
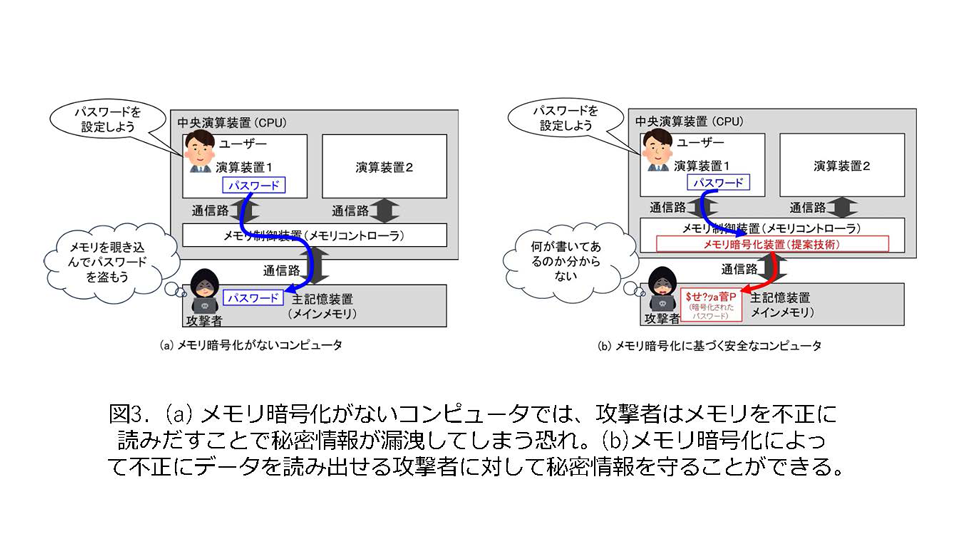
安全性を担保したまま、性能と利便性(レジリエンス性)を飛躍的に向上させるメモリ暗号化機構の新方式を開発し(図3)、国際会議 ACM SIGSAC Conference on Computer and Communications Security (CCS)にて発表しました。今後の多様なコンピュータにおいてデータの保護と安全な利活用に貢献する成果となります。
社会との連携を深め、新しい可能性を探るための行事を毎年実施しています。
共同プロジェクト研究の成果発表の場として毎年共同プロジェクト研究発表会を開催しています。国際的な情報発信の観点から毎年英語での開催としています。令和6年度は令和7年2月14日に本研究所大会議室を会場にオンラインで配信するハイブリッド形式で開催し、206名の参加を得ました。

北海道大学
帯広畜産大学
東北大学
弘前大学
筑波大学
群馬大学
千葉大学
東京大学
東京外国語大学
東京科学大学
一橋大学
新潟大学
富山大学
金沢大学
信州大学
静岡大学
名古屋大学
京都大学
大阪大学
神戸大学
鳥取大学
岡山大学
広島大学
徳島大学
愛媛大学
高知大学
九州大学
佐賀大学
長崎大学
熊本大学
琉球大学





 bana1.png (300px×80px)
bana1.png (300px×80px) bana1_e.png (300px×80px)
bana1_e.png (300px×80px) NovelPrize2015.png
NovelPrize2015.png