

外科手術を医師の技だけに頼っていたのは、もう過去の話だ。
手術の現場にはさまざまな医療機器が導入され、医師の施術を各方面からサポートする。
そのなかでも、内視鏡外科手術を支援する手術ロボットが、近年急速に広まりを見せる。
それが「第一世代」の手術ロボットだとすれば、
機器開発の現場では、「第二世代」の実用化が現実味を帯びつつある。
目指すは、ロボットの操作を人間の感覚に近づけること――。
東京医科歯科大学生体材料工学研究所の川嶋健嗣教授が、独自の手法でその課題に挑む。
開発中の手術ロボットの前で。これまでの研究生活のすべてがここに詰まっていると言っても過言ではない。
日本の医療は、大きな課題に直面している。
2007年以来、65歳以上の「高齢者」が総人口の21%を超える「超高齢社会」に突入し、医療費は年々増加の一途を辿る。かたや、医療を担う医師の不足も指摘され、医療の水準をどうすれば維持していくことができるのか、議論が絶えない。現場の医師にかかる負担を減らすため、医師を補助する医療機器の開発が急がれている。
事実、外科手術の現場では、開腹手術に代わる「低侵襲手術」が広まりを見せる。内視鏡を使った外科手術はその代表例だ。傷口を小さく抑えられ、術後の回復が早いことから患者のニーズも高い。だが、内視鏡外科手術は高度な熟練を要し、誰もが簡単に行なえるわけではない。そもそも医師の絶対数が不足している現状では、高度な技術を備えた医師の数も限られる。
こうした課題の解決につながるひとつの道筋として、内視鏡外科手術の手術支援ロボットに期待が集まる。東京医科歯科大学生体材料工学研究所の川嶋健嗣教授も、その開発に取り組むひとりだ。教授は、内視鏡外科手術の難しさを次のように語る。
「内視鏡外科手術では、内視鏡を操作する“スコピスト”と呼ばれるカメラ助手と、鉗子(かんし)と呼ばれる術具を操作する医師の2人が必要です。どちらも熟練の技が求められますが、人間が操作している以上、手ブレを完全には押さえられない難点があります。術者とスコピストのスムーズな連携も必要で、医療現場で手術支援ロボットの導入を求める声が高まっています」
医療の現場では、すでに手術ロボットの導入も始まっている。この分野で世界を席巻するのは、アメリカの企業が開発した「ダ・ヴィンチ」だ。2000年にアメリカで承認を受けたこのロボットは、2009年に国内でも医療現場での使用が認められた。医師の負担を軽減し、手術の精度を高める性能が評価され、2億~3億円程度と高価でありながら、2014年9月の時点で世界で3,000台強、国内でも200台近く導入されている。
術者は、内視鏡の3D画像を頼りに、マスターコントローラーでロボットのアームを操作する。アームの先端には、鉗子(かんし)と呼ばれる術具がついている。内視鏡を操作するのも同じくアームの動きによる。これが、ダ・ヴィンチはじめ、手術用ロボットの基本的な構造で、アームがマスターコントローラーの動きによって制御されることから、この方式は「マスタースレーブ」と呼ばれる。
巨大な先行者を相手に、川嶋教授が手術ロボットの研究開発に取り組むのは、ダ・ヴィンチにも弱点があるからだ。その弱点とは、内視鏡や鉗子の先端の触覚が術者に伝わらないことだ。
「術者は3D画像を見て内視鏡や鉗子を操作しますが、縫合用の糸を鉗子で強く引っ張りすぎて切れてしまったり、臓器に予想以上の力がかかったり、手術の現場でヒヤリとすることがあるようです」と、川嶋教授。現場の医師の声を受け、力覚を感じられる手術ロボットの研究開発に着手した。それが2003年のこと。当時、川嶋教授は東京工業大学精密工学研究所で准教授を務め、修士課程で同研究所にやってきたばかりの教え子にして、今は同研究所の准教授となった只野耕太郎氏と始めた研究だった。
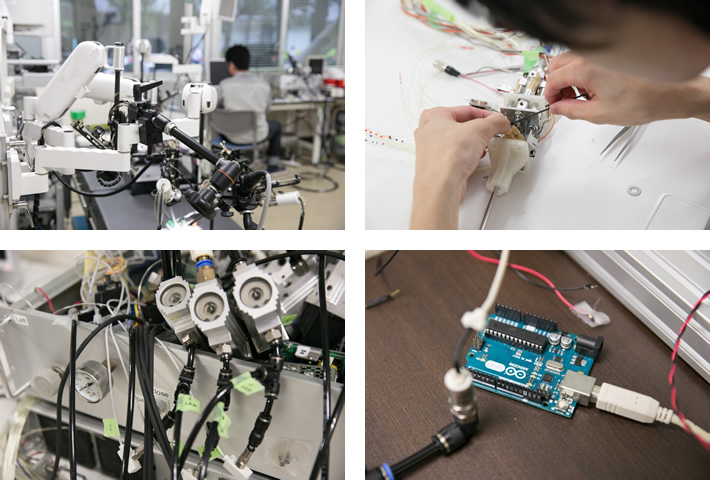
川嶋教授の研究室。工学系ならではの機材や道具があちこちに。そのなかで学生たちは自分の研究に取り組む。ここが医療系の大学の一画だとは、言われなければ分からない
どうすればロボットのアームの先端の触覚を術者が感じることができるのか――。
川嶋教授は、空気の圧力をアームの制御に使うことを思いつく。それまで教授は、空気の力で機械を精密に制御する研究開発に取り組んできた。その技術を、手術ロボットにも応用できると考えた。アームの先端に何かが触れれば、空気の圧力が変化し、それを触覚に変換することができる。
開発中のロボットは、鉗子を動かすサブシステムと内視鏡を操作するサブシステムからなる。もともとは鉗子を操作するロボットの開発から研究をスタートしたが、「同じ技術を内視鏡の操作に応用できることに気がついた」と教授は言う。
鉗子の操作は、ダ・ヴィンチ同様マスターコントローラーで行ない、内視鏡の操作には術者の頭部につけたジャイロセンサー(角速度センサー)を使う。術者の頭の動きによってカメラを動かし、内視鏡がとらえた3D画像を見ながらマスターコントローラーで鉗子を操作するのが全体の仕組みだ。

術者はマスターコントローラーを操り鉗子を操作する。3D用のメガネをかけ、モニターを見ながらコントローラーを操る。
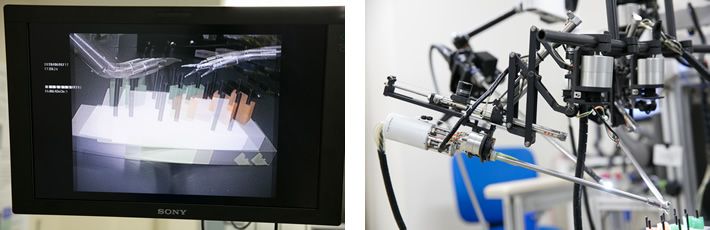
(左)モニターは3D対応で裸眼では像がダブって見える。(右)鉗子を取り付けるアームの先端。この動きを空気の力で精密に制御する。
アームの触覚を感知する機能は、臨床現場のニーズが高い。そのため、いくつもの研究グループが研究開発に取り組んでいる。
「高い精度が見込めるものとして、アームの先端に接触センサーをつける方式と光ファイバーを使用する方式とがありますが、いずれも実用化に向けては克服しなければならない課題があります」(川嶋教授)。
センサー方式の課題は大きく2つ。鉗子も内視鏡も、術具は清潔を保つため頻繁に滅菌洗浄する必要があるが、高精度のセンサーを水でジャバジャバ洗えるのかという問題がひとつ。さらに、センサーがどこまで電気ノイズに耐えられるかも問題になる。鉗子の先端に電気メスをつけて手術を行なうことがあるが、その電気ノイズでセンサーが誤作動しかねないからだ。光ファイバー方式は、光のひずみを測ってそれを触覚に変換する。こちらのネックは価格だという。
「私たちの空気圧制御方式は、構造がシンプルで安価につくることができ、水や電気ノイズの影響を受ないことが利点と考えています」
そう語る川嶋教授の表情には、確かな自信がみなぎっていた。

これまでの研究生活を懐かしそうに振り返る。苦しい時期もあったはずだが、それもすべて糧に変え、今がある
研究開始から10年を超す月日が経ち、技術は実用化のフェーズに入りつつある。2つのサブシステムのうち、内視鏡操作のロボットが、「EMARO(エマロ)」の名で今年の夏から販売が始まる。発売は、2014年5月に設立した大学発ベンチャー「リバーフィールド」社から。手術ロボットの研究をともに始めた、東京工業大学精密工学研究所の只野耕太郎准教授らと設立した会社だ。社名の「リバー(川)」と「フィールド(野)」は2人の名前に由来する。
発売を目前に控えた本年(2015年)4月には、TBSのドキュメンタリー番組「夢の扉」で開発中のロボットが紹介された。鉗子操作用のサブシステムも、2年後の臨床実験開始を目指して研究開発は大詰めを迎えている。
医療ロボットの開発に情熱を注ぐ川嶋教授は、祖父まで6代続く医者の家系の生まれだ。親戚にも多くの医者がいる。そのなかで教授の父はエンジニアの道を歩み、家系と父の血を受け継ぐかのように、自身はエンジニアリングで医療に携わる。
これだけ見ると「医工連携」の申し子のような生い立ちだが、「まわり道も多かった」と本人は振り返る。
「医療も工学もどちらも身近で、もともと“医工連携”に興味がありました。実際、学部4年のときには、通っていた東京工業大学(工学部制御工学科)から本学(東京医科歯科大学)の研究室に派遣され、人工呼吸器の研究に取り組みました。そのまま本学への進学を希望していましたが、所属していた研究室の事情で東工大に戻ることになりました」
修士・博士課程では、気体の流れを計測する研究に取り組んだ。学位取得後は、かねてより関心を抱いていたロボット制御の研究を志し、東京都立工業高等専門学校の門を叩く。そこでは通称「ロボコン」、NHKでも放映される「ロボットコンテスト」に携わった経歴もある。
川嶋教授が再び東工大に戻り、精密工学研究所の准教授に就任したのは2000年のこと。直後の2002年には、東工大はじめ、一橋大学、東京外国語大学、東京医科歯科大学が参加する「四大学連合」の取り組みが始まる。それぞれの大学の強みを補完しあい、複合領域の研究を進めるのが目的の取り組みだ。
その枠組のなかで、川嶋教授は東京医科歯科大学の医師たちから、手術ロボットの強いニーズを耳にする。先頭を走る「ダ・ヴィンチ」にも弱点はある。まわり道をした分、川嶋教授の研究の引き出しは増えていた。
これまで培った気体の計測とロボット制御の技術を組み合わせ、空気圧でアームを精密に制御する手術ロボットの研究開発に着手する。2013年4月には現在の東京医科歯科大学生体材料工学研究所に籍を移し、「医工連携」はさらにスピード感を増した。学生時代から抱いていた思いは、いまようやくひとつの実を結びつつある。
東京医科歯科大学は、その名が示すとおり医療系の大学だ。そのなかで工学系の生体材料工学研究所は異色の存在。医療の高度化という社会的な要請を受け、「医工連携」を推し進め、医療の「ものづくり」を支える最先端の場だ。
「ここは、本当の意味での“医工連携”ができる場所です。連携とは、要するにどれだけの時間を共有したかということ。ここにはプロフェッショナルな医師がすぐそばにいて、お互い気軽に足を運ぶことができます。医療系の実験施設も充実していて、ここから日本と世界の医療に貢献できる機器を開発したい」と、この研究所の魅力と果たすべき役割を誇らしげに語る。
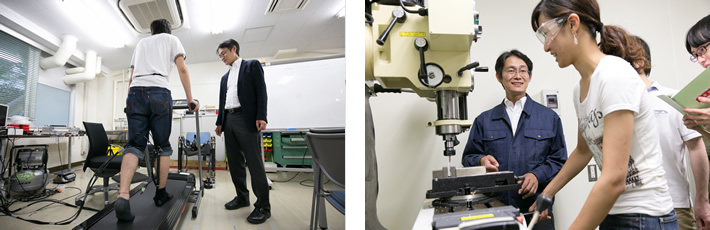
(左)現在開発中のパワーアシスト装置の出来栄えを生徒と確認する川嶋教授。この装置も空気の圧力を使って動きを制御する。
(右)医学部の4年生(写真手前の女性)に、フライス盤の使い方を教える川嶋教授。医学系の大学に工学系の研究室の存在は珍しく、外科志望の学生が関連領域として研究室に学びにやってくる。

学生の居室で学生たちと。研究室の風通しはよさそうで、学生たちものびのび研究に取り組んでいるようだった。
自身の「医工連携」の第一弾、手術ロボットの実用化が視野に入り、次の展開にも乗り出している。歩行を支援するパワーアシスト装置や、持ち運び可能な簡便な手術ロボットの開発がすでに始まっている。
念願だった「医工連携」の道をひた走る川嶋教授には、研究に臨むひとつのポリシーがある。それが、「強い頭」を持つことだ。
「私自身がそうですが、工学系の研究は、シャープな頭脳の持ち主でなくても、諦めずに粘り強く研究に取り組めば一定の成果を出せる分野です。実験で失敗しても考え続けること。100mを速くは走れなくても、マラソンを走りきれる耐久力があればいい。そういう“強い頭”を持つことが大切だと、恩師から教わりました。工学の力で医療に貢献できるのが“医工連携”の醍醐味です。“強い頭”で医療の明日を切り拓く人が増えてほしい」
商品化が視野に入った手術ロボットも、開発当初は医師から「まったく使えない」と酷評された苦い思い出がある。成果が出ない苦しい時期を「強い頭」で乗り切ったからこそ、川嶋教授の今がある。
教授が切り拓こうとしているのは、医療が抱える課題を解決する道筋だけではない。「医工連携」を目指す後進の学生たちのために、「強い頭」で道なき道を歩んでいる。

研究室の自席の前で。壁に張られているのは、これまでに取得した特許証の数々。多数の技術の集積が、手術ロボットをつくりあげる。

生体工学研究所は、附属病院がある湯島地区から神田川を挟んだ向かい、駿河台地区にある。周囲には多くの大学や歴史的な建造物があり、神田川のほとりには多くの木々が植えられている。歴史と文化、自然が混交するこの場所で、最先端の医工連携研究が進む。
昭和13年(1938年)東京高等歯科医学校に設置された歯科材料研究室に始まる研究所。昭和26年(1951年)、東京高等歯科医学校は東京医科歯科大学に改組、歯科材料研究室を母体に歯科材料研究所が設置された。その後、メディカルエレクトロニクス、人工臓器に関する研究が急務となり、歯科材料研究所は医用器材研究所となり研究領域を拡充、平成11年(1999年)には医療の高度化の社会的要請に応えるべく、組織改編にあわせて名称も現在の名前に変更。医療における「ものづくり」を先端的に担う研究所として、「医歯工連携」の研究と教育を先導する。
【取材・文:萱原正嗣 / 撮影:カケマコト】




 bana1.png (300px×80px)
bana1.png (300px×80px) bana1_e.png (300px×80px)
bana1_e.png (300px×80px) NovelPrize2015.png
NovelPrize2015.png